
Robotics in the Offshore Energy Industry
In 2021, the UK Government published its “Net Zero Strategy”, establishing a pathway to reaching net zero greenhouse gas emissions by 20501. To meet this target, the offshore wind capacity of the UK will need to scale up from the current 10-11GW2 of installed operational offshore wind capacity to at least 75GW by 20503.
As the offshore energy industry grows to meet the net zero demand, it will be required to find solutions that reduce operational downtime and expenditure, and reduce the risks of working in the extreme offshore environments. It will consequently become less feasible to send divers to assess subsea cables or rope access technicians to maintain wind turbine blades.
This article therefore explores two patented robotic innovations whose aim is to ensure the safe and scalable growth of the offshore energy industry.
BladeBug – GB2598756A4
BladeBUG5 have sought to develop an autonomous robot for extending the life expectancy of turbine blades out at sea. Their solution is a robotic device in the form of a hexapod capable of performing inspection, maintenance, and repair operations as it walks/crawls along the length of a wind turbine blade. To accomplish this, the BladeBUG is attached to high resolution cameras that obtain data indicative of surface conditions, ultrasound scanners that facilitate non-destructive evaluation of structural components, and a chamber containing resin which enables the BladeBUG to apply a coating to damaged regions of the blade.
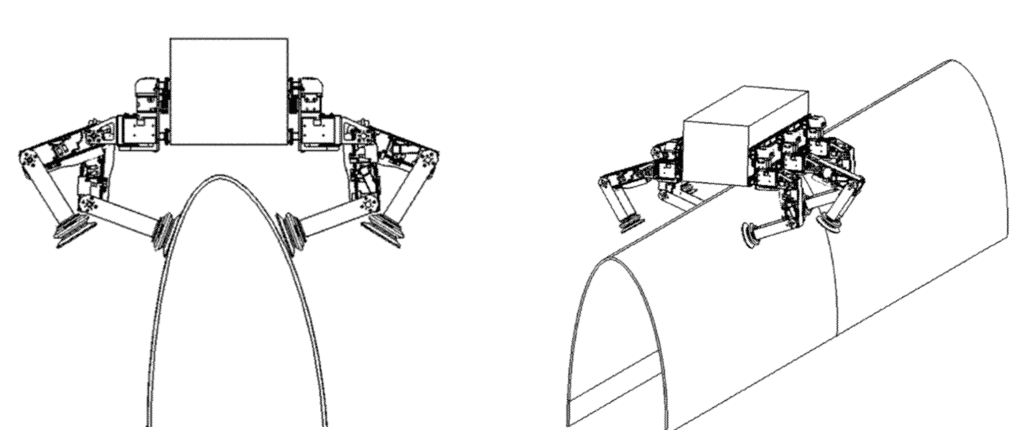
The BladeBUG robot comprises three legs on each of the left and right sides of the body. The foot of each leg is coupled to a suction device (e.g., a vacuum cup) that secures the BladeBUG to the surface of the wind turbine blade. The walking style of the BladeBUG can therefore be optimised to the orientation of the blade surface, such that the robot may securely grip and walk along any area of the blade.
Eelume – EP32503456
Eelume7 have developed a robot for subsea inspection, maintenance, and repair. The Eelume is a robotic arm which both mimics the undulating flexural motion of a snake or an eel, and contains thrusters, such that it may propel itself through the water. Its slender and flexible body enables it to execute inspection, maintenance, and repair services in confined spaces which have typically been inaccessible to conventional subsea vehicles.
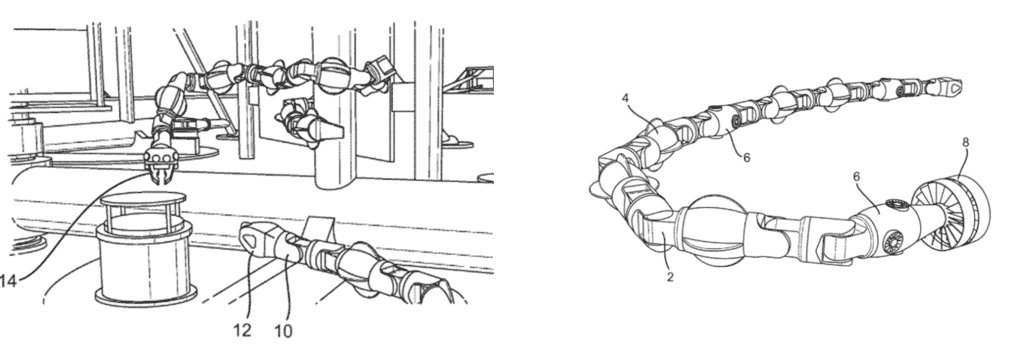
Like the BladeBug, the Eelume is fitted with a plurality of sensors and cameras, allowing it to obtain and relay data indicative of structural conditions. The Eelume may, for example, determine the corrosion integrity of a structure or use acoustic methods to check a pipe for leakages. The Eelume is further capable of an extraordinary range of manipulation tasks, it can use its gripper to open and close valves, guide a cable winch around/through a subsea module so it may be lifted to the surface, search for and recover objects lost in operation, and remove excessive build-up of biological material accumulating on underwater surfaces by using a brush tool or a high-pressure water jet.
Robotics and Autonomous Systems, such as the BladeBUG and the Eelume, could play a key role in improving the safety and reducing the costs associated with operating and maintaining offshore energy structures in the challenging conditions far from shore8.
Ultimately, human-robot collaboration may be the driving factor that enables the vision of “Mission Zero” to be realised.
References
- Net Zero Strategy: Build Back Greener – GOV.UK (www.gov.uk)
- The Crown Estate Offshore Wind Report 2021
- Air defence and offshore wind – working together towards Net Zero – GOV.UK (www.gov.uk)
- Espacenet – search results
- BladeBUG: Advanced robotics for turbine maintenance
- Espacenet – search results
- Reshaping Underwater Operations — Eelume
- CATAPULT – Robotics & Autonomous Systems (zone-secure.net)
This is for general information only and does not constitute legal advice. Should you require advice on this or any other topic then please contact hlk@hlk-ip.com or your usual HLK advisor.